|
|||||||||||||||
FreeRTOS for Renesas RX113 (RX100)
|
|||||||||||||||



|
|
|
|
Click images to enlarge
Demo Application Functionality
The simply blinky example
The blinky example is built when mainCREATE_SIMPLE_BLINKY_DEMO_ONLY is set to 1 in main.c. When this is done, main() calls main_blinky():-
The main_blinky() Function:
main_blinky() creates an RTOS queue, a queue send task, and a queue receive task, then starts the scheduler.
-
The Queue Send Task:
The queue send task is implemented by the prvQueueSendTask() function in main_blinky.c.
prvQueueSendTask() sends the value 100 to the RTOS queue every 200 milliseconds.
-
The Queue Receive Task:
The queue receive task is implemented by the prvQueueReceiveTask() function in main_blinky.c.
prvQueueReceiveTask() blocks to wait for data to arrive on the RTOS queue. Each time the value 100 is received from the queue it toggles LED 0. As data is sent to the queue every 200ms, the LED will toggle every 200ms.
The comprehensive test and demo application
 The comprehensive example is created when mainCREATE_SIMPLE_BLINKY_DEMO_ONLY is set
to 0 in main.c. When this is done, main() calls main_full():
The comprehensive example is created when mainCREATE_SIMPLE_BLINKY_DEMO_ONLY is set
to 0 in main.c. When this is done, main() calls main_full():
-
The main_full() Function:
main_full() creates a set of standard demo tasks, some application specific test tasks, a command line interface (CLI) task, a pseudo randomiser task, and then starts the scheduler. The pseudo randomiser task is just used to ensure some variation is added to the sequence in which the test tasks execute, and in so doing, improve the test coverage.
-
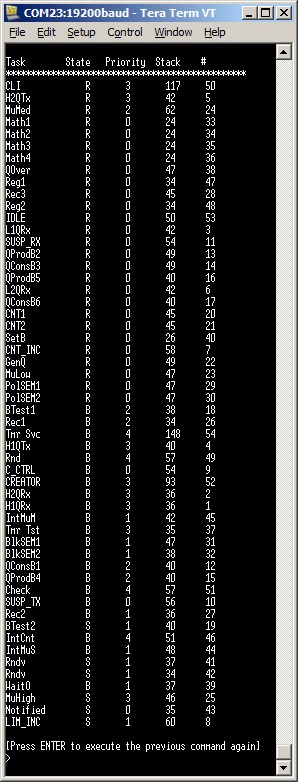
The command line interface (CLI)
The CLI is implemented using the FreeRTOS+CLI extensible command line interface, and uses SCI1 at 19200 baud for its input and output. As always with FreeRTOS+CLI, type "help" to see a list of registered commands.
-
The "Reg Test" Tasks:
The reg test tasks test the context switching mechanism by filling each MCU register with a known value, then continuously checking that each register maintains its expected value for the lifetime of the task.
-
The "Check" Task:
The "Check" task monitors the status of all the other tasks in the system, looking for a task either stalling, or reporting an error. It toggles LED 0 each time it iterates around its implementing loop.
If the LED is toggling every three seconds then the check task has not detected any stalled tasks, or detected any errors. If the LED is toggling every 200ms then at least one error has been found.
RTOS Configuration and Usage Details
RX113 RTOS port specific configuration
Configuration items specific to this demo are contained in /FreeRTOS/Demo/RX100_RX113-RSK_GCC_e2studio_IAR/src/FreeRTOSConfig.h for the IAR and GCC projects, and /FreeRTOS/Demo/RX100_RX113-RSK_Renesas_e2studio/src/FreeRTOSConfig.h for the Renesas compiler project. The constants defined in these files can be edited to suit your application. In particular -- configTICK_RATE_HZ
This sets the frequency of the RTOS tick. The supplied value of 1KHz is useful for testing the RTOS kernel functionality but is faster than most applications need. Lowering this frequency will improve efficiency.
- configKERNEL_INTERRUPT_PRIORITY
This defines the interrupt priority used by the RTOS kernel for the RTOS tick timer and software interrupts. This should always be set to the lowest interrupt priority, which is 1 for the RX113. See the configuration pages for more information.
- configMAX_SYSCALL_INTERRUPT_PRIORITY
This defines the maximum interrupt priority from which RTOS API functions can be called. Interrupts at or below this priority can call FreeRTOS API functions provided that the API function ends in 'FromISR'. Interrupts above this priority cannot call any FreeRTOS API functions but will not be effected by anything the RTOS kernel is doing. This makes them suitable for functionality that requires very high temporal accuracy (motor control for example).
Writing interrupt service routines (ISRs)
Interrupts can be written using the standard compiler syntax. Examples for all three supported compilers are provided below.Often an ISR wants to cause a context switch so the task that is returned to when the ISR completes is different to the task that the ISR originally interrupted. This would be the case if the ISR caused a task to unblock, and the unblocked task had a priority above that of the task that was already in the Running state. This can be achieved by calling portYIELD_FROM_ISR(), which takes a single parameter. The parameter must be 0 if a context switch is not required, or non-zero if a context switch is required. portYIELD_FROM_ISR() is used in the examples below.
/* Pragma used to install the interrupt. The 'enable' used in the pragma
tells the compiler to enable interrupts before executing the user code. */
#pragma interrupt ( Excep_PERIB_INTB128( vect = 128, enable ) )
/* Function definition. */
void Excep_PERIB_INTB128( void )
{
long lHigherPriorityTaskWoken;
/* Interrupts are already enabled here. See comment above. */
/* vTaskNotifyGiveFromISR() is an interrupt safe FreeRTOS function. It is
assumed the task handle has already been stored. If notifying the task
unblocks the task, and the task that is unblocked has a priority above the
priority of the currently executing task, then the lHigherPriorityTaskWoken
parameter will get set to pdTRUE inside the vTaskNotifyGiveFromISR()
function. */
vTaskNotifyGiveFromISR( xTask, &lHigherPriorityTaskWoken );
portYIELD_FROM_ISR( lHigherPriorityTaskWoken );
}
An example interrupt service routine using the Renesas compiler syntax
|
/* Pragma used to install the interrupt. */
#pragma vector = VECT_TMR0_CMIA0
/* Function definition. */
__interrupt void vT0_1_InterruptHandler( void )
{
long lHigherPriorityTaskWoken;
/* Unlike when using the Renesas compiler, interrupts must be explicitly
re-enabled inside the interrupt service routine. */
__enable_interrupt();
/* vTaskNotifyGiveFromISR() is an interrupt safe FreeRTOS function. It is
assumed the task handle has already been stored. If notifying the task
unblocks the task, and the task that is unblocked has a priority above the
priority of the currently executing task, then the lHigherPriorityTaskWoken
parameter will get set to pdTRUE inside the vTaskNotifyGiveFromISR()
function. */
vTaskNotifyGiveFromISR( xTask, &lHigherPriorityTaskWoken );
portYIELD_FROM_ISR( lHigherPriorityTaskWoken );
}
An example interrupt service routine using the IAR compiler syntax
|
/* The function prototype uses the interrupt attribute. The then function
must be manually inserted into the interrupt vector table. */
static void vT0_1_InterruptHandler( void ) __attribute__((interrupt));
/* Function definition. */
void Excep_PERIB_INTB128( void )
{
long lHigherPriorityTaskWoken;
/* Unlike when using the Renesas compiler, interrupts must be explicitly
re-enabled inside the interrupt service routine. */
__asm volatile( "SETPSW I" );
/* vTaskNotifyGiveFromISR() is an interrupt safe FreeRTOS function. It is
assumed the task handle has already been stored. If notifying the task
unblocks the task, and the task that is unblocked has a priority above the
priority of the currently executing task, then the lHigherPriorityTaskWoken
parameter will get set to pdTRUE inside the vTaskNotifyGiveFromISR()
function. */
vTaskNotifyGiveFromISR( xTask, &lHigherPriorityTaskWoken );
portYIELD_FROM_ISR( lHigherPriorityTaskWoken );
}
An example interrupt service routine using the GCC compiler syntax
|
Generating the RTOS tick interrupt
FreeRTOS requires exclusive use of a timer that is capable of generating the tick interrupt - but it is up to the application writer to define which timer is used. To do this, the application must define a function called vApplicationSetupTimerInterrupt() that configures a timer to generate an interrupt at the frequency specified by the configTICK_RATE_HZ setting in FreeRTOSConfig.h, then install the RTOS tick interrupt handler in the corresponding location within the interrupt vector table.When using the IAR and Renesas compilers the RTOS tick handler is installed simply by defining configTICK_VECTOR to the appropriate vector number in FreeRTOSConfig.h.
When using the GCC compiler the RTOS tick handler and RTOS software interrupt handler must be manually added to the appropriate vectors in the vector table definition. The RTOS tick handler is called vPortTickISR(), and the RTOS software interrupt handler is called vPortSoftwareInterruptISR(). See the source file vector_table.c in the GCC project for an example.
It is suggested that a compare match timer is used to generate the tick interrupt, and an example implementation of vApplicationSetupTimerInterrupt() that uses compare match timer 0 is included in main.c within each RX100 demo application.
Resources used by FreeRTOS
FreeRTOS requires exclusive use of the software interrupt.Compiler options
As with all the ports, it is essential that the correct compiler options are used. The best way to ensure this is to base your application on the provided demo application files.Memory allocation
Source/Portable/MemMang/heap_4.c is included in the RX113 demo application project to provide the memory allocation required by the RTOS kernel. Please refer to the Memory Management section of the API documentation for full information.Miscellaneous
Note that vPortEndScheduler() has not been implemented.
NXP tweet showing LPC5500 (ARMv8-M Cortex-M33) running FreeRTOS.
Meet Richard Barry and learn about running FreeRTOS on RISC-V at FOSDEM 2019
Version 10.1.1 of the FreeRTOS kernel is available for immediate download. MIT licensed.
View a recording of the "OTA Update Security and Reliability" webinar, presented by TI and AWS.
FreeRTOS and other embedded software careers at AWS.

![]()




![]()


