| |||||||


|
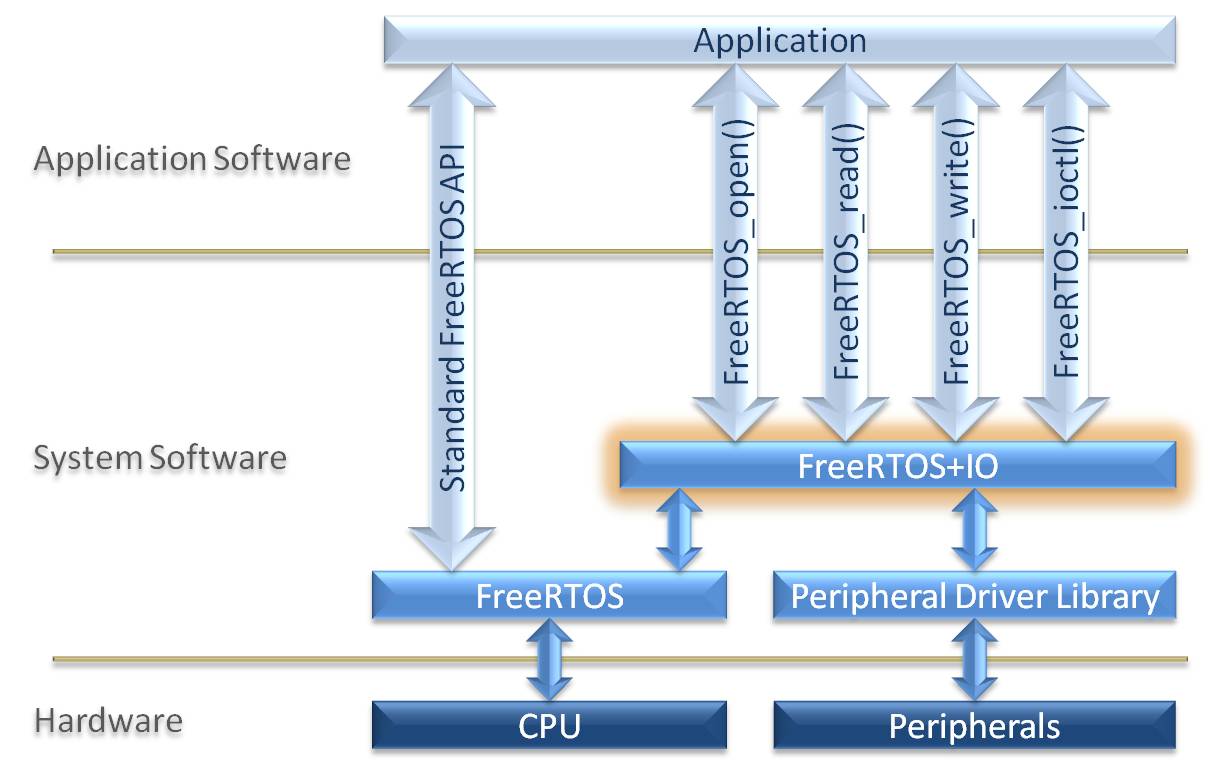
FreeRTOS+IO
|
| Transfer Mode | Data Direction | Description |
| Polled | Read and write | The most basic read and write mode, where busy waits are used instead of interrupts. |
| Interrupt driven circular buffer | Read only | An interrupt driven mode where received data is placed into a buffer by an interrupt service routine, reads then remove data from the buffer. |
| Interrupt driven zero copy | Write only | An efficient mode where an interrupt service routine transmits data directly from a write buffer, with not additional RAM required for intermediary storage, and no additional copy required. |
| Interrupt driven character queue | Read and write | A simple mode where FreeRTOS queues are used to buffer data between an interrupt service routine and the read or write operation. |